Background
The X45e units (Ethernet version) can be used in more generic applications. This article focuses on the Lua mode. It should be used if a functionality is required that is not part of the build in functionalities. In this mode a Lua script controls the X45e unit (conveyor or function). It is possible to store up to 10 scripts at the unit but only one can run at a time. It is not possible to call one script from another. Password protection is available.
For deeper information please check the following manuals:
- User documentation - Electrical System (X45e)
- User documentation - Parameter Setting Tool
Prerequisites
Hardware
- PC (Windows 7 or later)
- X45e unit (with power cables)
- Mini USB cable
Software
- X45e - Parameter Setting Tool
Software version
Make sure the unit has the latest software versions installed. Look at MyFlexLink under the Download Area for information about the latest release. This article was written when the FEG version 8.2.4 was the latest version. The PST version used is 3.4.1.
Wizard
To set the proper parameter setting to the X45e unit the wizard is a good help. This is started with the command Change Node.
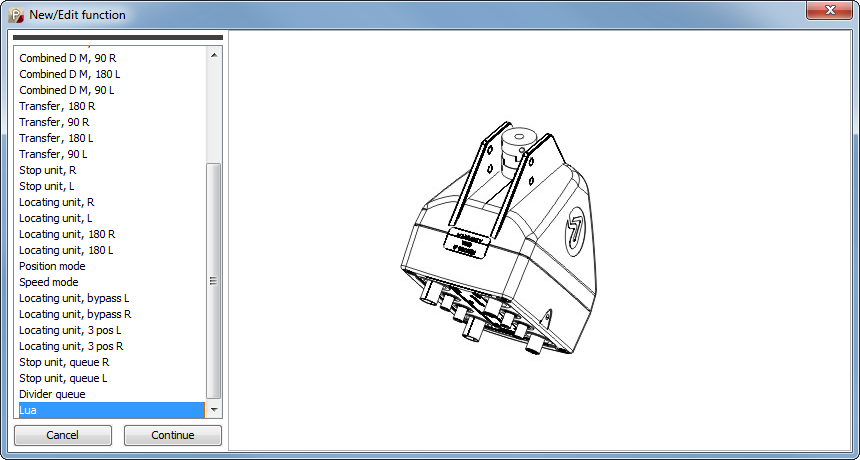
The first window in the wizard decides which standard (physical) type the unit should be set to. The Lua option should be selected in this case.
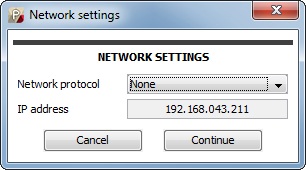
The Network settings window can only be set to None. IP address is shown if already set.

Control settings window is the next popup window in the wizard. None of the choices (Enable-Reset, Control, Variant, Interlock) could be set to anything else than default values.

The last popup window in the wizard is the IP settings window. Here a fixed IP address can be set. Ethernet connection is required to use Lua editor. Otherwise only a file transfer via USB is possible.
After the wizard is completed the unit is updated with these settings (if working in Direct mode). Then a reboot of the unit is required to initialize Lua mode in the unit.
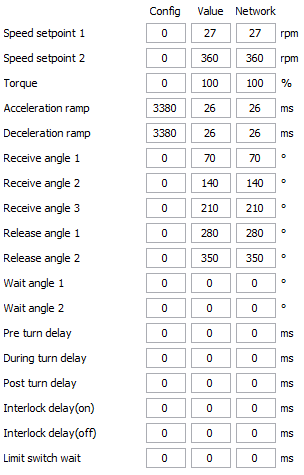
All of the parameters in the settings windows are updated to the unit. If some of these parameters should be changed this could be done via the Parameter Setting Tool.
There are two was available to get Lua script on the unit. Either Tools / Activities / Lua file handling or Tools / Activities / Lua editor. Lua file handling requires USB connection while Lua editor requires ethernet connection.
Lua file handling
Lua file handling is available with USB connection in menu Tools / Activities / Lua file handling. No lua script is running while this panel is active.

Here you see the list of Lua scripts stored at the unit. The used (default) script is written bold. You can send Lua files form computer to unit or read selected file from unit to computer. It is also possible to delete selected file or set it as default. Password might be required.
Lua editor
Lua editor is a web-application served in PST and running in your browser. Computer and unit have to be in same Ethernet network. Lua editor can be started in menu Tools / Activities / Lua editor. Password might be required.

Lua editor connects automatically with unit and stops running Lua script. Here you see the list of Lua scripts stored at the unit. The used (default) script is maked with '>'. You can create new files at unit, modify existing files, delete or rename files. You can change the default scrip or run a script for testing. Editor supports auto completion (CTRL + SPACE) containing standard Lua API and X45e related API. Console printings from script are shown in logging area (lower area of editor). Editor supports auto completion (CTRL + SPACE) containing standard Lua API and X45e related API.
Lua API
Additional to standard API of Lua, X45e has an own API. It is supported in Lua editor.
General information
Lua script will be called once at end of initialization of unit. This should be used to initialize variables. Script can register "execute" function which will be called periodically.
You can get time information from status library. Function get_time_ms returns system time in milliseconds. Function get_counter of each state machine returns time in current state in milliseconds.
Library dio
This library gives control over digital inputs and outputs.
DIO functions
- create - returns access to pin with defined name
- get_pin_names - returns list of available pin names
Metatable pin
Pin is used to read/write a digital input or output.
Pin functions
- get - returns current state of pin
- set - set new state to pin
Available inputs and outputs

Example code
pin = dio.create('DIGITAL_OUT_1')
pin:set(1)
state = pin:get()
Library config
This library gives access to configuration parameters.
Config functions
- create - returns access to parameter with defined name
- get_parameter_names - returns list of available parameter names
Metatable parameter
Parameter is used to read current value of configuration parameter.
Parameter functions
- get - returns current value of parameter
Available parameter
- MOTOR_TYPE
- FUNCTION_MODE
- CALIBRATE
- NODE_ID
- SPEED_SET_POINT_2
- SPEED_SET_POINT_1
- TORQUE
- RECEIVE_ANGLE_1
- RECEIVE_ANGLE_2
- RECEIVE_ANGLE_3
- RELEASE_ANGLE_1
- RELEASE_ANGLE_2
- WAIT_ANGLE_1
- WAIT_ANGLE_2
- ACCELERATION_RAMP
- DECELERATION_RAMP
- ENABLE_DRIVE
- RESET_ERRORS
- DEBUG_MODE
- FUNCTION_PARAM_1
- FUNCTION_PARAM_2
- FUNCTION_PARAM_3
- FUNCTION_PARAM_4
- REQUEST_ANGLE
- PRE_TURN_DELAY
- DURING_TURN_DELAY
- POST_TURN_DELAY
- AUTOMATIC_RESET_ERRORS
- INTERLOCK_MODE
- INTERLOCK_DELAY_ON
- INTERLOCK_DELAY_OFF
- ENABLE_DRIVE_RESET
- ABUS_NETWORK_PROTOKOL
- FEG_PROGRAM_MAJOR_VERSION
- FEG_PROGRAM_MINOR_VERSION
- FEG_PROGRAM_PATCH_VERSION
- OPERATING_MOTOR_POWER
- OPERATING_MOTOR_CURRENT
- OPERATING_MOTOR_VOLTAGE
- OPERATING_SECONDS
- OPERATING_MINUTES
- OPERATING_HOURS
- OPERATING_DAYS
- OPERATING_YEARS
- OPERATING_CYCLES_HIGH
- OPERATING_CYCLES_LOW
- POSITIONER_MODE
- POSITIONER_RATIO
- FUNCTION_GROUP
- FUNCTION_VARIANT
- ECO_PROGRAM_VERSION
- TEMPERATURE
- DEBUG_ENABLE
- LIMIT_SWITCH_WAIT
- POS_REQ_ABSOLUTE_CLOSEST
- POS_REQ_ABSOLUTE_CCW
- POS_REQ_ABSOLUTE_CW
- POS_REQ_RELATIVE
- ECO_CURRENT_ANGLE_CCW
- ECO_CURRENT_ANGLE_CW
- IP_HANDLING_AUTOMATIC
- IP_ADDRESS
- IP_SUBNET_MASK
- IP_GATEWAY
- IP_DNS_SERVER
Example code
parameter = config.create('FUNCTION_PARAM_1')
value = parameter:get()
Library status
This library gives access to rated and current status of control and motor part as well as to state machines.
Status functions
- create_state - returns access to state with defined name
- get_state_names - returns list of available state names
- create_statemachine - returns access to state machine with defined name
- get_statemachine_names - returns list of available state machine names
- get_time_ms - returns current system time in milliseconds
Metatable state
State is used to read rated or current state of control or motor part. Each state contains a list of values, while a value may consist of a number of bits.
State functions
- get - returns state as list of values
Available states
- CURRENT_STATE
- Digital in (uint8)
- Digital in 1 (bit 0)
- Digital in 2 (bit 1)
- Digital in 3 (bit 2)
- Digital in 4 (bit 3)
- Digital in 5 (bit 4)
- Digital in 6 (bit 5)
- Digital in 7 (bit 6)
- Digital in 8 (bit 7)
- Status (uint8)
- Function state (bit 0 - 2)
- Wait (bit 3)
- In position (bit 4)
- Reverse direction (bit 5)
- Drive enabled (bit 6)
- Errors cleared (bit 7)
- Position (uint8)
- Release angle 1 (bit 0)
- Release angle 2 (bit 1)
- Receive angle 1 (bit 2)
- Receive angle 2 (bit 3)
- Receive angle 3 (bit 4)
- Wait angle 1 (bit 5)
- Wait angle 2 (bit 6)
- Error (uint8)
- Over current (bit 0)
- High UDC (bit 1)
- Low UDC (bit 2)
- PCB over temperature (bit 3)
- Locked rotor (bit 4)
- Internal fault (bit 5)
- Output overload (bit 6)
- Digital in (uint8)
- RATED_MOTOR_STATE / CURRENT_MOTOR_STATE
- Speed (int16)
- Torque (int16)
- Position (int32)
- State (uint8)
- Power enable (bit 0)
- Power disable (bit 1)
- Drive enable (bit 2)
- Drive disable (bit 3)
- Break enable (bit 4)
- Break disable (bit 5)
- Encoder enable (bit 6)
- Encoder disable (bit 7)
- Operational mode (uint8)
- No operation (0)
- Run (5)
- Calibrate (6)
- Speed (9)
- Error (uint16)
- Over current (1)
- High UDC (5)
- Low UDC (6)
- PCB over temperature (8)
- Locked rotor (10)
- Internal fault (15)
- Encoder angle (uint16)
Metatable statemachine
Statemachine is used to read and write current state of functional parts of motor. Each statemachine contains current state and time since state change. It is recommended to use MOTOR_STATEMACHINE at drive-unit and FUNCTION_STATEMACHINE at function-unit.
Statemachine functions
- get_counter - returns millisecond counter since last state change
- get_state - returns current state of this state machine
- set_state - sets new state to this state machine
Available state machines

Example code
state = status. create_state ('CURRENT_STATE')
list = state:get()
error = list[4]
functionStateMachine = status.create_statemachine('FUNCTION_STATEMACHINE')
functionState = functionStateMachine:get_state()
Library control
This library allows to set speed, direction and angle to motor controller.
Control functions
- create - returns access to feature with defined name
- get_feature_names - returns list of available feature names
Metatable feature
Feature is used to set speed, direction and angle to motor controller.
Feature functions
- set - set new value to feature
Available features
- SPEED - motor speed between -360 and 360 rpm, recommended speed for drive motor is -320 to -80 and 80 to 320
- DIRECTION - next turn direction of function motor: 0 means clockwise; 1 means counterclockwise
- ANGLE - next target angle of function motor between -360 and 360 degree
Example code
feature = control.create('SPEED')
feature:set(150)
Library console
This library allows to print information to console of Lua editor.
Console functions
- print - prints the string
Example code
state = 1
con.print(“state: ”..state)
Library utility
This library provides helpful utilities.
Utility functions
- sleep - sleeps for x milliseconds
- angle_for_position - calculates angle in degree from motor position
- direction_closest_distance - returns turn direction to move closest distance between to angles
- in_position - returns if two angles are close enough to say position is reached
Example code
-- sleep 100 ms --
utility.sleep(100)
targetAngle = 90
motorPosition = 12345
motorAngle = utility. angle_for_position(motorPosition)
inPosition = utility.in_position(motorAngle, targetAngle)
direction = utility.direction_closest_distance(motorAngle, targetAngle)